| Allt Nytt | Kalender | Racerbanor | Arrangörer | Forum | Varvtider/Loggar |

 |
Racetech
 Hur ser den perfekta mcpherson framvagnen ut?
Hur ser den perfekta mcpherson framvagnen ut?
|
<< 1, 2, 3, 4, 5, 6 >> 37 besök senaste veckan (45548 totalt) |
Att mäta upp CGH med travers verkade smidigt ifall man hade haft tillgång till det, tyvärr har jag varken det eller har möjlighet att höja bilen 500mm men samtidigt kanske det inte är nått måste att ta reda på det för att få hyfsad ordning på framvagnen? Jag kommer ändå bygga allt ganska justerbart så går att prova köra några olika RC höjder och känna vad som känns bäst, 50mm som du säger kanske är ett bra utgångsläge. Jo de blir lätt krångligt med KPI, SAI, spindelvinkel och allt de där. De vinkeln jag tänkte på som ändras ifall man justerar camber mellan fjäderben/spindel är vinkeln mellan vinkeln mellan övre undre leden i förhållande till spindeltappen, spindelvinkeln? Och jag har för mig att nån skrev i den andra tråden att camber skulle justeras vid topplagringen, inte mellan fjäderben/spindel och dom flesta som kör racing justerar väl också camber just vid topplagringen? Jo precis min tanke med att sänka vinkeln på SAI/KPI var att flytta ut topplagringen 10mm och sen justera vinkeln fjäderen/spindel för att få rätt camber (jag vet det går emot det jag skrev här ovan och jag vet inte heller ifall det är rätt tänkt?) Fast nu när jag försöker tänka till lite angående det här så räknar man väl SAI/KPI vinkeln vid 0 grader camber så då borde ju inte SAI/KPI ändras ifall man ökar camber genom att flytta topplagringen? Okej så man ska inte lita helt på värdena man får ut i exelfilen? Finns det lite buggar eller nå i den? 
|
||||||||||||||||||||||
|
_aero
Inte buggar direkt vad jag vet i excelarket............. Excel-filen du använder är bara en jä.... föränklad form av verkligheten. Bara i 2-dimentioner, utan tex däckskomprimering mm och krängning. Och tex spårvidden åker inte med tex ändrad bärarmslängd. Detta ger att skrubbradien kan bli fel bla. Men det ger en storleksårding vart en förändring på olika ställen ger en storleken på rc förändring storlek. Så ändrar man något och kollar allt så ger excelfilen en finngervising vart det pekar typ. CGH: Skall rätt radikala förändringar för att påverka cgh i någon större utsträcking som jag känner. Så typ 40% av takhöjden på en karrsos bil känns ok. Har någon annan känsa så kom med den med fakta............ Har man en just justeringsmån på krängre och stötdämpare är man inom bollplanket. SAI/KPI/spndelvinkel/rc/camber komp mm så gäller det att hålla tungan i rätt mun ifråga om vilken utgångspunkt(vertikalt mm) och hur vad som händer i geometrin vid rör på sig kräning/pitch mm. Medveten om att även däcken fjädring påverkar allt. Hmm jag är medveten det vart luddigt nu, jag har inte stenkoll....... Tyvärr finns det mycket få konstanter utan det mästa är en varibale av massa variblar som påverkar varndra. Hur många variblar finns det? Vad är ett minimum för att träffa någulunda rätt? I ärligheten skull har jag inte kollat hur många. Men många är det................ 
_________________ Johan Sjölinder
|
||||||||||||||||||||||
|
fuling
Okej det förstår jag att inte finns med i exelfilen men bara man är noga med att ändra alla andra mått som far när man ändrar nått så får man ju en bra uppfattning om hur saker och ting är  Men visst hade de varit bättre med nått program där man kan simulera roll på bilen osv. Men visst hade de varit bättre med nått program där man kan simulera roll på bilen osv.
Jo precis borde ju funka helt ok som du säger att köra på den uppskattningen av CGH, visst håller man på med racing och ska kapa tiondelar är det en sak men min bil är bara en busbil som ja vill ska kännas bra att ratta runt banan. SAI/KPI känner jag att ja kanske ska lägga åt sidan lite just nu tills jag har fått lite bättre förståelse för RC, blir så mkt att ha i huvudet samtidigt. Precis är så många variabler som spelar roll för väghållning och är man och pillar i nått så ändras massa annat som man måste kolla upp och försöka hitta nån bra balans mellan allt, känns lite som att försöka gå på lina innan man har lärt sig gå nästan man har så pass dålig koll på exakt vad alla parametrar har för inverkan på väghållningen. Jag har försökt läsa på lite angående RC höjd och jacking effekter på nätet dom senaste dagarna men vet inte om jag blivit så jättemkt klokare, endel skriver att man kan bygga in jackning till sin fördel och läst om RC höjder från just över markplan till 10% av CGH till allt möjligt annat men jag tycker det känns som att de borde funka bäst att försöka hålla RC ganska nära markplan på en FWD så man får så lite jacking effekt som möjligt och krafter som bryter och har sig utan att fjädrar/dämpare får jobba mest. Men ändå lägga RC så högt så att det aldrig hamnar under markplan vid roll för om RC åker under markplan sticker det väl fort iväg ännu längre ner? Kan tänka mig att jacking i framvagnen behövs mer på rwd och därför vill man ha högre RC på RWD än FWD? Skulle vara intressant att se hur mkt RC rör sig på bilen vid max roll i kurvtagning.
|
||||||||||||||||||||||
|
Med risk för att glida förbi detaljer så händer inte jättemycket när RC skär markplan på annat än rent geometriska/matematiska dividera med noll lustigheter.
Jag hade snarast fokuserat på ett konsekvent beteende mellan fram/bakvagn, eller i alla fall velat veta vad som händer fram respektive bak under inbromsning/turn in/mid corner/turn out och anpassat resten, fjädrar och dämpare, efter det kända geometriska beteendet. _________________ Pontus Fyhr
|
||||||||||||||||||||||
|
Om du som start tittar på rc rak bil.
Om vi antar 1grd kräning 1600mm spårvidd tan1*1600/2->ca 15mm (sin eller tan för små vinkar blir ca lika) Ger ca 15mm infjädring på ytterhjulet 15mm utfjädring på innerhjulet. in/ut rc -15 17 0 58 15 98 (detta borde du ca få ut i excel-filen) För ytterhjulet gäller rc -15 och för inner hjulet +15 Mao du kan se hur rc rör sig vid krängning
Håll nu tungan i rätt mun. rc infjädring gäller ytterhjul i böj rc utfjädring gäller innerhjul i böj. _________________ Johan Sjölinder
|
||||||||||||||||||||||
|
_________________ Johan Sjölinder
|
||||||||||||||||||||||
Nä det kanske det inte gör men tanken jag hade kring det var att när väl RC åker under markplan så får man väl antijackning på innerhjulet, dvs att båda inre lederna för bärarmarna kommer börja röra sig neråt och RC kommer börja röra sig neråt ännu fortare när det väl kommit under markplan men det kanske inte har nån betydelse eller så tänker jag fel där? Jo precis jag har själv också börjat fundera på förhållandet mellan fram och bak, RC och framförallt fjädringsfrekvens. Men kan du utveckla lite mer vad du tycker man bör ha i åtanke när du säger att man bör veta vad som händer fram respektive bak under inbromsning/turn in/mid corner/turn out?
Jo fast blir det verkligen så? För ifall man för in värdena i exel så blir det väl som att hela bilen skulle vara +15 eller -15 ifall man ändrar så? och man har väl bara 1 RC för båda hjulen? Jag tror den där sidan du länkade till är till större hjälp när man börjar fundera på vart RC hamnar när man svänger än exelarket
Sen har jag börjat fundera lite på förhållandena mellan fram och bak för att få bilen att styra in bättre. RC högre bak än fram ger väl bättre instyrning, jag har stel bakaxel så då sitter väl RC i panhardstagets infästning i axeln? Högre frekvens på fjädrarna bak än fram borde väl också hjälpa till med instyrning? Nu ligger fjädringsfrekvensen fram på 2,65Hz enligt exelfilen. Hur mkt högre borde man lägga sig på i frekvens bak isåfall? Och hur räknar jag ut fjädringsfrekvensen eller lättare sagt hur hårda fjädrar jag ska satsa på? MR är ganska högt på bakaxeln, jag kan mäta upp det.
Tack så mkt! jättebra sida det där!  
|
||||||||||||||||||||||
Vet inte exakt vad jag tänkte skulle hända, mer att skifta fokus från "det är dålig turnin låt oss titta på framvagnen" till, titta på hela bilen, hur ser bakaxeln ut? Stämmer denna bild? Isf kan en viss liten skillnad i beteende åt höger och åt vänster väntas, hur styv är toe bak? 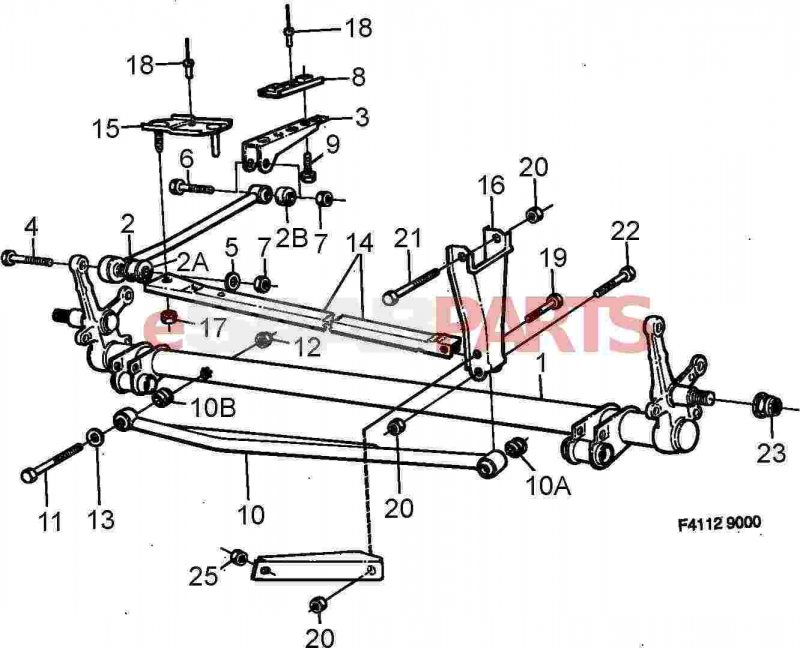
Vad jag tänker mig i resonemangsform är lite av det du gräver efter med din RC går negativ, men du bromsar och bilen niger 50 mm eller något, om vi antar att RC var 25 mm ovan markplan från början, så går det alltså negativt under inbromsning. Men RC-CGH avståndet har troligtvis inte rört sig så mycket (utan att ha tjuvkikat i t.ex. vsusp eller annat), vilket är typiskt för A-armar och borde vara överförbart på Mcpherson. Medans bakvagnen i en idealiserad värld har avlastats och stigit 50 mm, men här har panhard-stagets centrum (som jag tror kan antas vara RC) inte rört sig så mycket, så RC-CGH förhållandet är längre än det var förut. Du styr in lite lätt, och enligt "last/tid" grafen Johannes bidrog med har du alltså negativt inflytande av RC på uppbyggnaden av kraften, och borde således kompensera det med t.ex. dämpare, som visserligen tar lite längre tid på sig att reagera men ändå är snabba jmf med resten av systemet. De kräver dessutom en rörelse, eller mer korrekt en hastighet på hjulet för att göra sin grej, men med lite "blending" av broms och sväng så går det nog jobba med. Här ska alltså framhjulen initiera en rotation, men hur villiga bakhjulen är att "vara med" i det där vet vi inte, har man massa toe in bak, dynamiskt eller statiskt, så kan man ge bakvagnen en fin 8 grader slipvinkel men står bakhjulen i -2 så blir det bara 6 kvar hur man än vrider och vänder på det. Antar vi att vi kommit till mid corner på en plan bana gör dämparna inte mycket, fjädrar och RC, här är "balansen" som jag länge jagat, något statiskt förhållande mellan tyngdpunkt, fjäderkonstanter, motionratios etc. Får man detta rätt borde det gå att mäta som hög hastighet på apex, ingen last varken framåt eller bakåt bara maximal lateralacceleration. Sen får man se upp för mätfel pga bristande utnyttjande av banbredd, tänk en cirkelbåge vars radie gick från 50 till 48 meter. Hur viktigt detta egentligen är (i förhållande till "de andra två") kan man fråga sig. Till turn out då, börjar gå på gas, framänden lyfter lite, men vi har fortfarande rätt mycket laterallast kvar. Om RC stiger här börjar vi få positiv jacking igen, vilket "vänder" på resonemanget från turnin, men RC-CGH består och vi får leva med ungefär samma roll som innan, med "bonusrisken" att vi kanske får slut på fjädringsväg inner-fram och kanske tappar möjlighet att accelerera ut ur kurvan. Men vi kanske kan leva med både lite jacking och överlastade ytter-bakhjul, eftersom det gissningsvis går att accelerera sig ur eventuell oversteer. CGH-RC avståndet bak sjuker dock troligen under acceleration, då RC står nästan still. Det blev lite av en rant, men något i linje med ovan var vad jag tänkte mig, dock gärna med något mätbart.
_________________ Pontus Fyhr
|
||||||||||||||||||||||
Helt rätt tänkt 
Nu skall jag sparka undan bena på dig tyvärr 
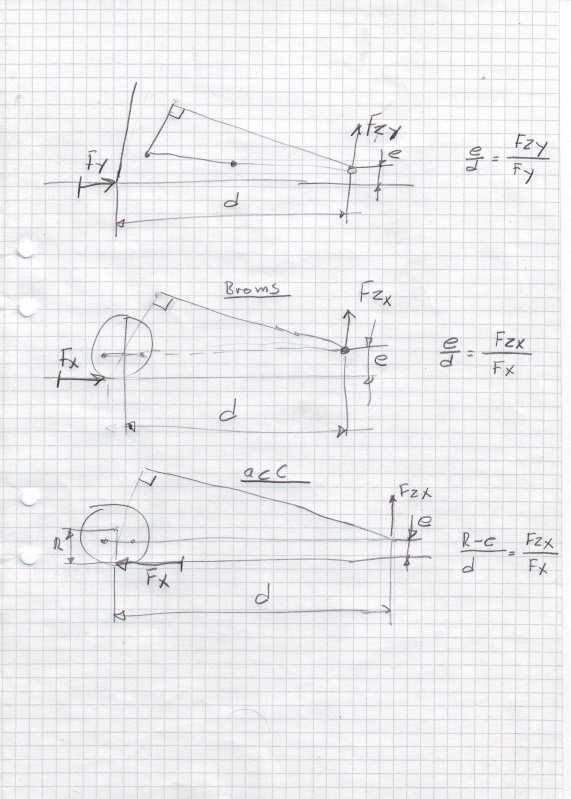
Glöm, tro inte, bilen rollar runt rc...... Liknade, samma, fenomen som "rc" har vi i broms och acc. Men då heter det antidive, antilift, antisqoat mm mm. OBS nu så orden förmodligen ihoppblande, felstavade mm av mig. För mig är det likgiltigt. Helt plötsligt så geometrisk använder man inte en pitchpunkt(pitchcentrum) Varför då? Jag vet inte, jag förstår INTE. Men jag insett fenomenen. Typ geometrin påverkar greppet och verseversa. Och fenomenet är lika, skall/bör ses lika i roll/pitch/broms/acc/kurva. I mitt pall kallar jag det alla för antifaktor. Lite att funder på kanske, eller så rör jag bara till det mer
in/ut rc -15 17 0 58 15 98 Förhållandet sidokraft från däcket som lyfter/sänker karrosen ed=2*rc/tw (antifaktor) Geometriskt är e och d katetrarna i en 3-angel. d är det horisontella avståndet från däckcentrum(spårvidden) till ic(instans center) e är det vertikala avståndet från markplan till ic Hmm ic kan även kallas mp(monemetan punkt) Kärt barn har många namn
ed ytterhjul är 2*17/1600 ->0,021 ->arctan(0,021) ->1,2grd (ed är 2*58/1600 ->0,072 ->arctan(0,072) ->4,1grd) ed innerhjul är 2*98/1600 ->0,122 ->arctan(0,122) ->6,9grd För att strula till det mer så kränger bilen på däcken också. Anta 1grd. Det betyder att ytterhjulets ed ökar och innerhjulet minskar. ed ytter 1,2+1 ->2,2grd sen tan ger ed 0,038 (3,8%) ed inner 6,9-1 ->5,7grd sen tan ger ed 0,100 (10%) Nu skall jag jä.... ännu mera
Mästa greppet ligger på ytterhjulet i kurva Anta typ 80/20% Anta greppet är 1 (kraft) ger ytterhjul 0,8*0,038 ->Fed 0,028 innerhjul 0,2*0,1 ->Fed 0,02 (F=kraft) Ytter sidan åker upp med 0,028 och inner ner med 0,02 Mitt tankesätt, titta på varge hörn separat. Typ ytterhjul, fjädrar in (vertikalt) och inner ut. Vad händer med geomtrin? Inner/ytter hjul? Sen vinkar sig, rollar, pga ytterdäcket fjädrar in och innerdäck ut. vad händer? (typ rc) _________________ Johan Sjölinder
|
||||||||||||||||||||||
Jo det förstår jag! Såklart hela bilen spelar inför hur balansen och instyrning osv är. Varför jag mest har tagit upp framvagnen nu är för att ja kände att ja hade kört fast lite på just den. Yes den bilden är på bakaxeln som sitter på min bil förutom en skillnad att jag har gjort hjulhubbarna bultade så jag kan schimsa toe och camber. Jag har provat att köra lite toe ut bak, funkade bra när man svängde men bilen vart ganska nervös rakt fram så nu kör ja jättelite toe in. Angående panhardstaget så funderar jag på att bygga om till wattlänk för att få samma betende vid höger/vänsersväng och samdigt bygga så man kan justera RC men vill man ha själva wattlänken monterad i bakaxeln eller karossen? Tack det var bra förklarat hur man ska tänka sig genom svängen! Jag kollade vsusp lite snabbt och det verkar vara samma med mcpherson, RC-CGH avståndet verkar inte påverkas så mkt av att bilen niger vid inbromsning. Dock är min bil ganska hårt ställd så några 50mm niger den inte vid broms, kanske runt 20 och ja tror den fjädrar in max runt 40-50mm vid kurvtagning så RC far kanske inte omkring så mkt ändå. Men ja kan mäta upp max infjädring vid kurvtagning och kolla i vsusp hur mkt RC far omkring då.
Bak hade man väl helst velat att RC-CGH avståndet hade blivit lite kortade vid inbromsning för de hjälper väl turn in? Bilen borde väl lättare lyfta lite på innerhjulet då? Sen förstår jag ditt tänk genom kurvan förutom när man ska initiera en rotation och det där med 8 grader slipvinkel på bakvagnen? kan du utveckla det? Tack iaf för förklaringen kul att lära vad man ska tänka på av dom kunniga
Ja bjuder på en bild från en bankörning för några år sen när bakre krängningshämmaren hade gått av, bilden passar bra in på jacking, överlastade ytterhjul, slut fjädringsväg i fram och dåligt grepp i fram tycker jag 

|
||||||||||||||||||||||
Oj nu vart det krånglligt här! Jag har läst lite angående antilift/antidive men ja hoppade snabbt över det, kändes bara som att det krånglade till det på tok för mkt
Mkt ränkade där sen man jag tror jag hänger med. när du säger att ytterhjulet kommer åka upp med 0,028 och innerhjulet ner med 0,02 vad menar du exakt då? är det metriskt eller med nån kraft?
|
||||||||||||||||||||||
Ang 1, ja kanske men det går lika bra att lösa med krängningshämmare t.ex. Vad jag tänkte i turn-in är ungefär, du ställer någon slipvinkel på framhjulen (med ratten), den genererar någon lateralkraft som ger ett yaw-moment, bilen börjar rotera, vilket i sin tur ger en slipvinkel på bakaxeln och så vidare. Vilken faktisk slipvinkel man önskar sig (eller får för den delen) är svårt att uppskatta. Men det kan vara något att ha i åtanke se bild: 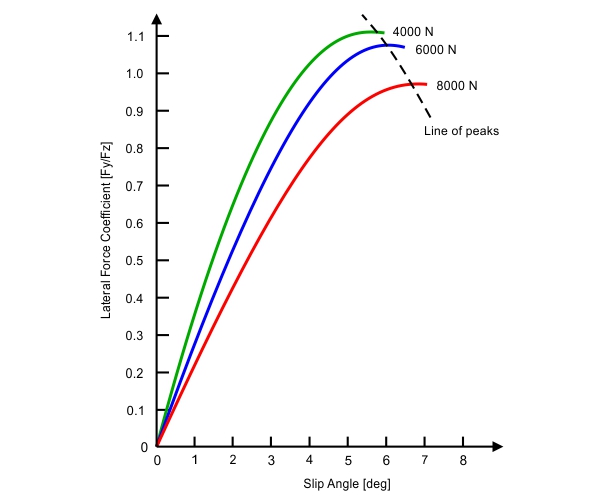
Länk: http://racingcardynamics.com/racing- Edit: kanske även denna, för att återknyta till den uråldriga tråden om Ackermann http://cafe.daum.net/_c21_/bbs_searc 
_________________ Pontus Fyhr
|
||||||||||||||||||||||
|
Senast ändrad av fuling, 19 Nov 2017 12:39, ändrad totalt 1 gång
Vänta, det kommer klana. Eller så blir du mer förvirrad fast på ett högre plan
Hmm jag skulle hälst inte vilja använda begreppet rc(rollcentrum). Det innerhåller för många tveksamheter, för många gamla sanningar mm. Sen alla antieffekter (rc, antidive, sqaut) är samma sak. Antieffekt är, en del, %-stas, förhållande, av grepskraften som lyfter/sänker utan att påverka fjäder/stötämpre. Eller har någon en bättre förklaring? (text och jag är sådär sams )
Din bil i vsusp. (kolla om det verkar stämma) EDIT: Länken funkade inte längre (borttagen)
Det vissuellea man får ut är bra. Diagramen(Chart) får jag inte ut i den form jag vill ha
Hmm kan vara så illa jag inte förstå vad de visar
Och sen detta: vsusp verkar använda 2 Jag har sugit på karamellen förut och använder 1. Frågan är vad är rätt? Eller minst fel? (rc skiljer en hel del mellan 1 och 2) 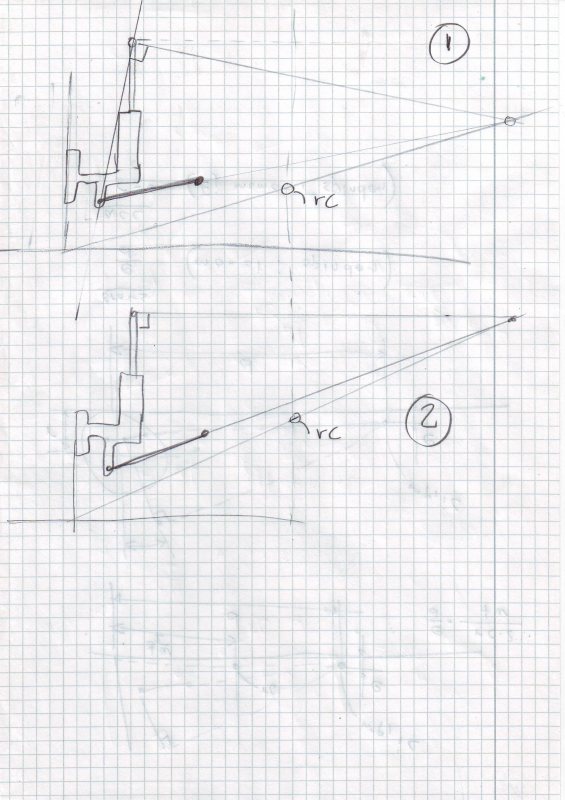
_________________ Johan Sjölinder
|
||||||||||||||||||||||
Kortversionen: Grabbarna som gasar och bromsar gör rätt, det är vi som gör fel. Ett försök till förklaring: För att vi skall få några anti-effekter; 'behövs det krafter som går genom bärarmarna. Tänk dig en dragsterbil, under acceleration går det en j-vla massa krafter genom de bakre bärarmarna. Om man då ändrar höjden på någon av infästningspunkterna, kan man få bilen att lyfta eller sjunka. I framvagnen däremot; 'har vi inga longitudinella krafter, vilket gör att vi kan sätta infästningspunkterna var f-n vi vill utan att det kommer att påverka rörelsen. Dags att svänga: Om vi håller oss till en tvåhjulsmodell (den duger för den här beskrivningen) så vill jag påstå att RC-tänket, enligt StringComputer-modellen, bara duger vid försiktig kurvtagning. När man börjar svänga på riktig; går det inte att få fram RC genom att slå ihop höger- och vänster sidas hjulupphängningar. Exempel: Full sidokraft, icke drivande axel; i det läget har vi ~ 0 sidokraft på innerhjulet, vilket gör att även dess bärarmar är obelastade. Nu kommer en liten Minion och skruvar bort bärarmarna och lägger dem i depån. För grabbarna gasa/bromsa har det här ingen betydelse, eftersom de vet att obelastade hjul inte påverkar bilens rörelse. För de som tror på RC blir det svårare, StringComputer-modellen säger ju att alla bärarmarna skall var med i matchen, vilket gör att om vi vill beräkna RC; då måste vi ta hänsyn till VAR i depån Minionen la bärarmarna. _________________ "Full fart; spar tid." /Igino Cazzola Blandar italienskt, tyskt och engelskt i en härlig gröt.
|
||||||||||||||||||||||
|
Citat från annan tråd (https://rejsa.nu/forum/viewtopic.php?t=40875)
RollCenter med hänsyn till olika grepp inner/ytterhjul:
_________________ Johan Lekås
|
||||||||||||||||||||||
Näe. Och det kan inses med en enkel gränsvärdesanalys. Om man applicerar den metoden som du har beskrivet i din bild och antar att vi närmar oss 0 resp 100% i last på inner resp ytterhjul så kommer innerhjulet, som i princip saknar markkontakt, inte ha någon som helst lateral påverkan på fordonet. I det läget är det helt ointressant vilken geometri det är på länkarmarna till det obelastade innerhjulet. Detta till trots ansätter du med din bild ett rollcentrum som är beroende av hur helt obelastad geometri för tillfället är vinklad. När bilen trehjular så är det bara hjul med markkontakt som har påverkan. Metoder som enkelt kan inses inte hanterar detta när man närmar sig ändläget är felaktiga, kraftigt förenklade eller är baserade på småsignalanalys då man tittar på responsen i obelastat läge och extrapolerar. Sistnämnda är förvånansvärt vanligt i många böcker i ämnet. Sätt upp kraft- och momentekvationerna och räkna fram reaktionspunkten i stället. Den här rekommenderas som läsning: 
_________________ Ove Sponton Det var inte jag. Dessutom var det ingen som såg mig.
|
||||||||||||||||||||||
|
.
Definition av rollcenterhöjden: Rollcenterhöjden är den höjd på chassiet där en horisontell kraft inte orsakar krängning
Nu har du inte läst ordentligt Ove  . Metoden har inget problem med en gränsvärdesanalys: . Metoden har inget problem med en gränsvärdesanalys:
När man går mot 0/100 % fördelning mellan inner/ytterhjul flyttas den röda linjen i figuren åt vänster mot innerhjulet. Höjden på den röda linjens skärning med innerhjulets momentanpunkts-linje går då mot noll (vilket illustrerar möjligheten att demontera innerhjulets länkarmar och lägga dem i depån), och det är bara lutningen på ytterhjulets momentanpunktslinje som påverkar rollcenterhöjden. 
Rollcenterhöjden är den större blå pluppen. Den är halvvägs mellan de två mindre plupparna som är skärningspunkterna mellan momentanpunkts-linjerna och kraftfördelningslinjen. (Den som vill ha en beskrivning och ekvationer med Mark Ortiz egna ord kan kolla sidan 6 och 7 i artikeln May/June 2009 "The anti controversy" ) Rollcenterhöjden är oberoende av tyngdpunktens höjd eftersom det är en funktion av bilens geometri, inte viktfördelning. Därför är det en omväg att räkna enligt "Forcebased roll centers" (även om tyngdpunktshöjen ändå måste in nånstans om man ska kunna analysera en bils beteende )
_________________ Johan Lekås
|
||||||||||||||||||||||
|
Vad vill vi ha fram och varför?
Vad är viktig och inte? Hmm viktigt för funktionen, vad som händer när ett bilkräk svänger/bromasr/accar eller akademiskt snyggt/rätt formulerat? rc höjden som benämning, funktion, rent geometriskt i sig ser jag som ointresankt. Men pga i alla, de flästa, läroböcker, diskutioner mm dyker rc upp så använder jag rc-begreppet. Sen kan man därimot uttrycka det som är intresankt i rc höjd form med en variabel till tw(spårvidden). Sen är det bara slå in i pallet att rc inte är en konstant. Den varierar med in/utfjädering. (ytter/innerghjul) Ger 2st olika olika rc, en för innerhjul och en för ytterhjul. Och sen åker rc för inner och ytterhjul också med däckshöjden. Däckshöjden styrs av däckets belastning, mao däckets fjäderkonstant. Redan nu börjar det bli riält soppigt, eller? Och då har jag inte äns kommit till vad som händer dynamiskt.
Sen vad jag tycker är riält störande, förvirrande är alla begrepp, benämningar för samma funktion. rc, antispout, antilift, antidive. Sen alla olika förklaringar vad som händer...
Så får man glömma allt man lärt sig och börja på ruta 1. Mao ifrågasätta ALLT. Nu inte sagt allt man lärt sig är fel utan mer hur mycket det är en anpassing efter verkligheten. En sak i detta teama jag lärt mig. Hmm nu är jag tjatig, rc antilift mm. Samma jä... sak i olika riktingar, längs/tvärs bilen mm. Men defenitionerna, förklarings modellerna, mätmetoderna skilljer avsevärt? Varför är det så? ps Nu känns det som jag ordbajsat tillräckligt
_________________ Johan Sjölinder
|
||||||||||||||||||||||
Jag skyller på amerikanerna; hela StringComputer-resonemanget är FEL!!! men istället för att erkänna (we f-cked up) så vägrar man att börja om från början, utan försöker att kompensera feltänket genom att göra små förändringar till ursprungskonceptet. Det går inte att sminka en gris! Släng RC i soptunnan, där det hör hemma, och lyssna på gasa/bromsa-folket. Jag säger inte att deras tänk är perfekt, men det är väldigt mycket bättre än RC-tramset. /gammal sur gubbe _________________ "Full fart; spar tid." /Igino Cazzola Blandar italienskt, tyskt och engelskt i en härlig gröt.
|
||||||||||||||||||||||
|
Racetech
Hur ser den perfekta mcpherson framvagnen ut?
|
<< 1, 2, 3, 4, 5, 6 >> 37 besök senaste veckan (45548 totalt) |